Dario Longobardi
Software Developer / Robotics / Machine Learning & Deep Learning
About Me
I'm a software developer with over two decades of experience, specializing in complex systems and performance optimization. My career has been built on a deep proficiency in Linux environments and bare metal chip programming across architectures, always striving to maximize system efficiency and capabilities. In recent years, I've focused my attention on integrating cutting-edge technologies in the field of artificial intelligence. I've gained a solid understanding of deep neural networks, successfully applying them in computer vision projects for image analysis and interpretation, and in robotics, where I've contributed to developing innovative solutions for automation and intelligent control. I'm passionate about tackling complex technical challenges and transforming innovative concepts into robust, high-performance software solutions.
Technical Skills
Languages / scripting
- C/C++ (favorite language)
- PHP
- Javascript
- Html/css
- Java
- Python
- SQL
- GLSL / Opengl / Vulkan
- Bash/Shell scripting
- Cuda
Frameworks
- Tensorrt
- TensorFlow, Keras
- PyTorch
- Hugging Face Transformers
- OpenCV
- OpenFrameworks
- AVR/ESP-IDF
- Arduino
- Android SDK
ML Methodologies
- Supervised & Unsupervised Learning
- Reinforcement Learning
- Feature Engineering & Selection
- Model Evaluation & Optimization
Deep Learning
- CNNs, RNNs, LSTMs
- Generative Models (GANs, VAEs)
- Transfer Learning & Fine-tuning
Platforms & Tools
- OS Linux based
- Android
- Docker, Git, GitHub
Databases & Big Data
- PostgreSQL
- Apache
Open source projects
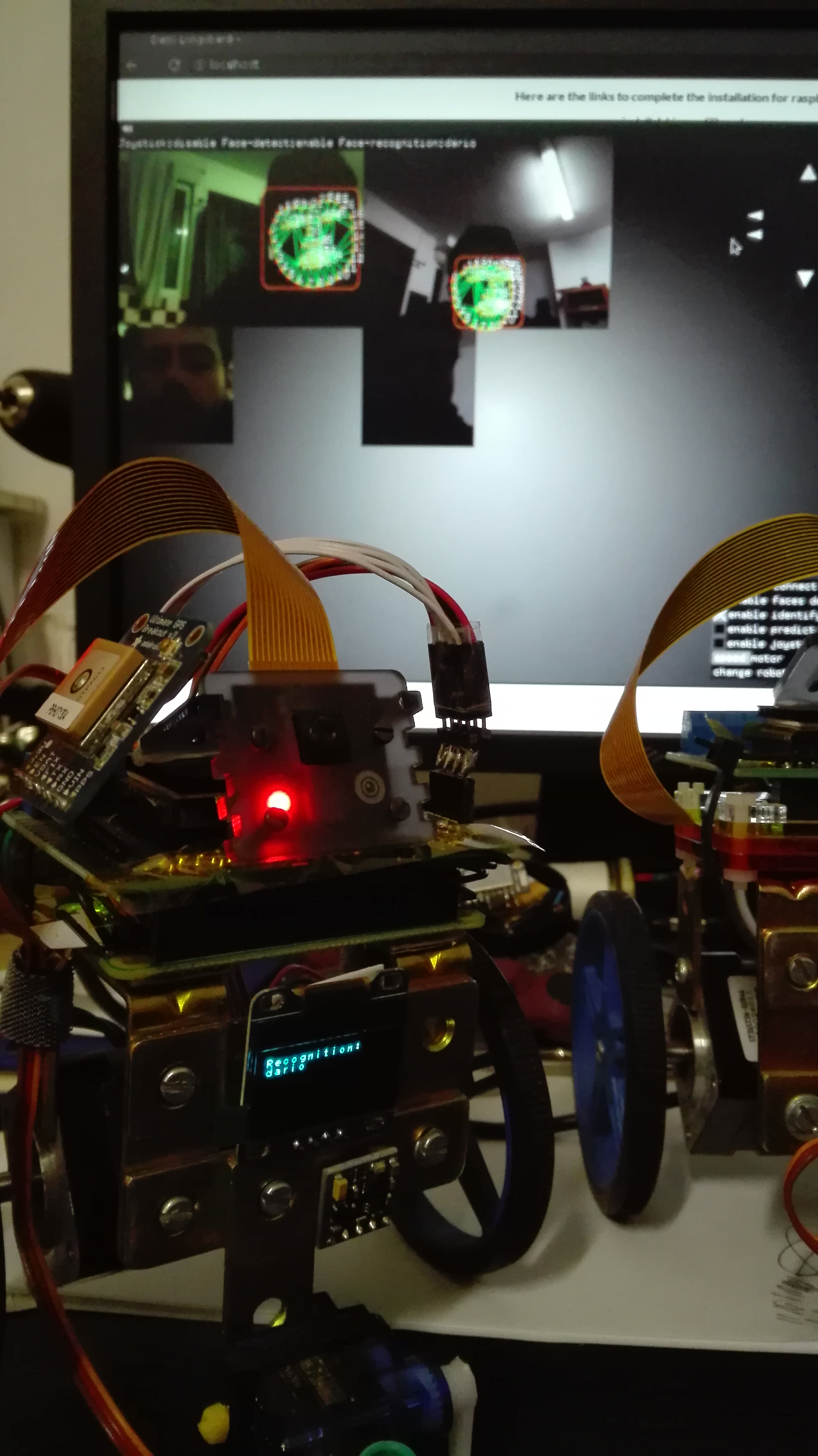
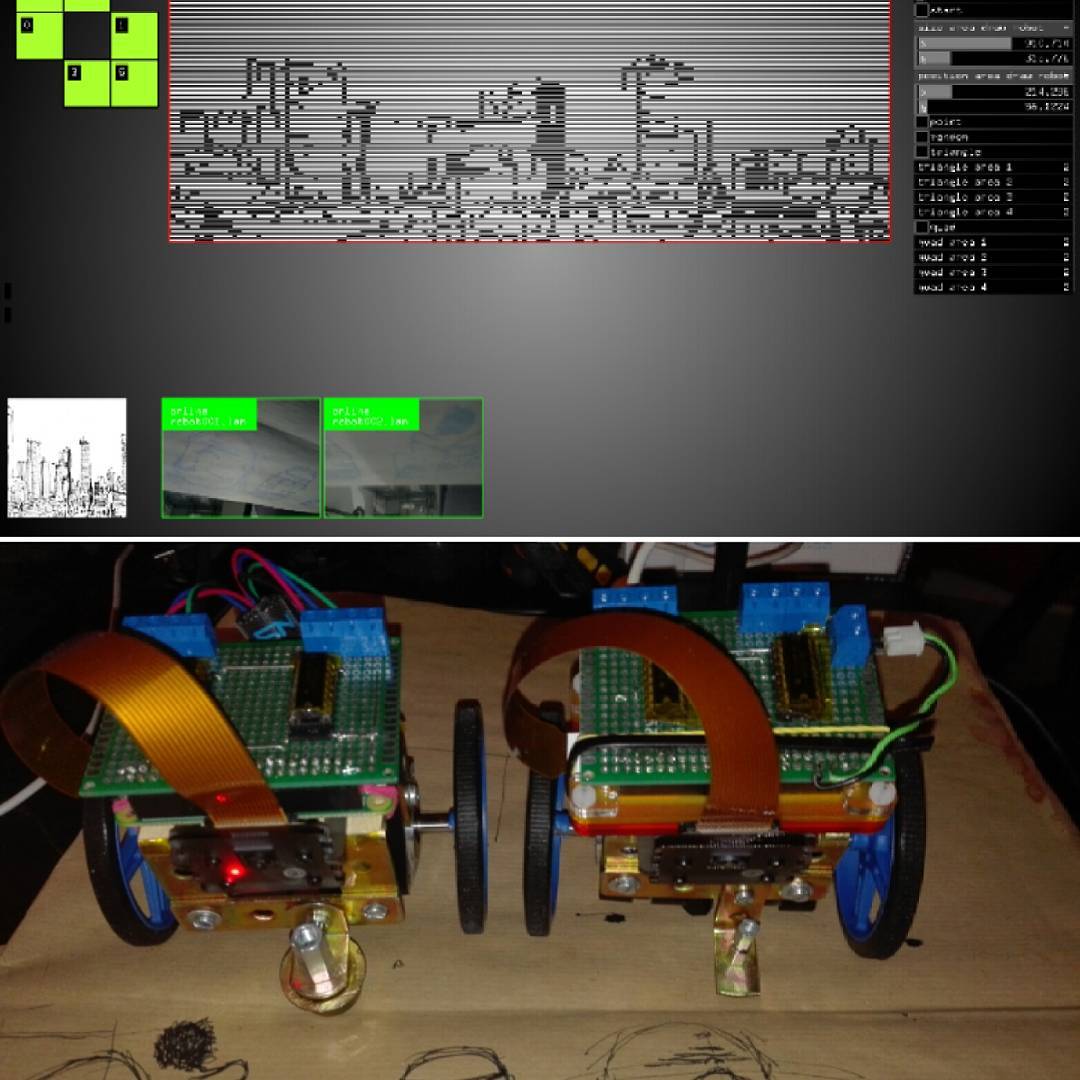
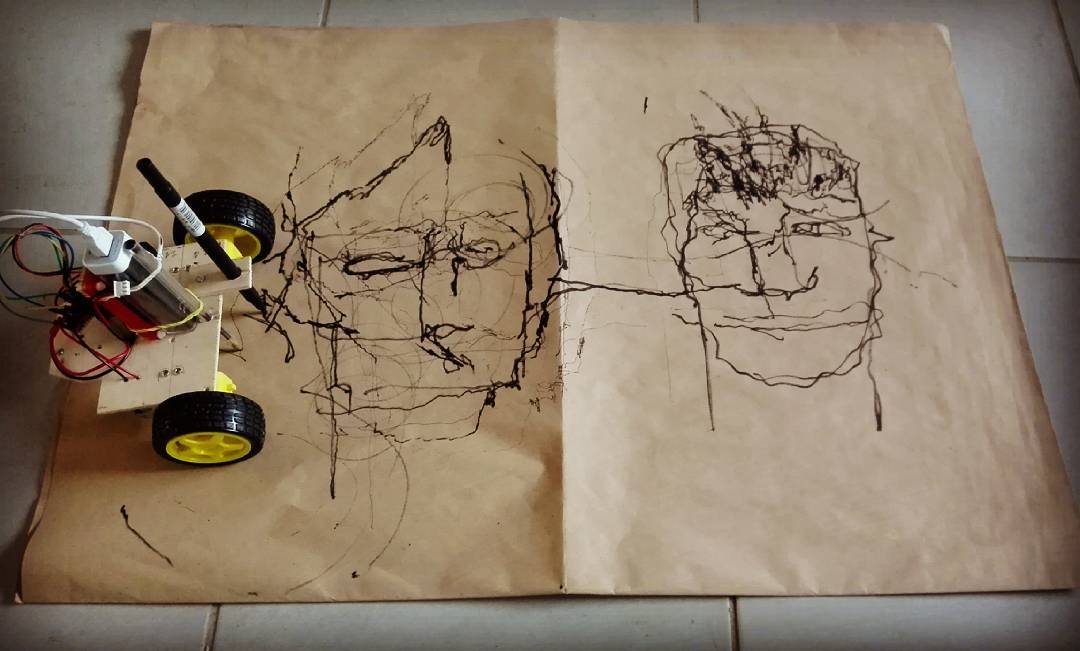
Autonomous Navigation Reinforcement Learning Network
Description: This project presents a Reinforcement Learning system designed for autonomous navigation in complex environments with obstacles. It utilizes a small feed-forward neural network and an epsilon-greedy agent to find optimal paths from a starting point to a destination. A key highlight is the practical demonstration with a small ESP8266-based robot, programmed using the Arduino environment, offering a tangible example of the system's capabilities. Developed in C++ with minimal dependencies, the code is designed to be easy to understand and use, making it ideal for educational purposes and practical learning.
Technologies: cpp / neural networks / Reinforcement Learning
ofxGPIO
Description: A small library in C++ for the use of GPIO raspberrypi/orangepi/jetson and more..
Technologies: cpp / electronics / openframeworks
ofxCloth
Description: Cloth simulation for openframeworks
Technologies: cpp / glsl / openframeworks
Midi Wifi
Description: esp based wifi midi console
Technologies: c/cpp / esp / midi / wifi
More repository / Utility / Sample / Study
Description:
Technologies: Robotics / DL / ML / Computer Vision / Creative Tech
Preview old works

Professional Experience
[Software Developer] - [Dynamica S.r.l], [Milano (IT)]
[2016] – [2025]
- Led the development and integration of ML models for [Video Surveillance / Robotics / Middleware], with a measurable impact of 90% on operational efficiency.
- Designed and implemented data pipelines for training and deploying Deep Learning models in production environments.
- Collaborated with multidisciplinary teams to define requirements, conduct exploratory analysis, and validate ML solutions.
[Freelancer] - [ziggurats company], [Napoli/Milano/Amsterdam]
[2010] – [2020]